
Publications
Review on Structure-based Errors of Parallel Kinematic Machines in Comparison with Traditional NC Machines
Abstract
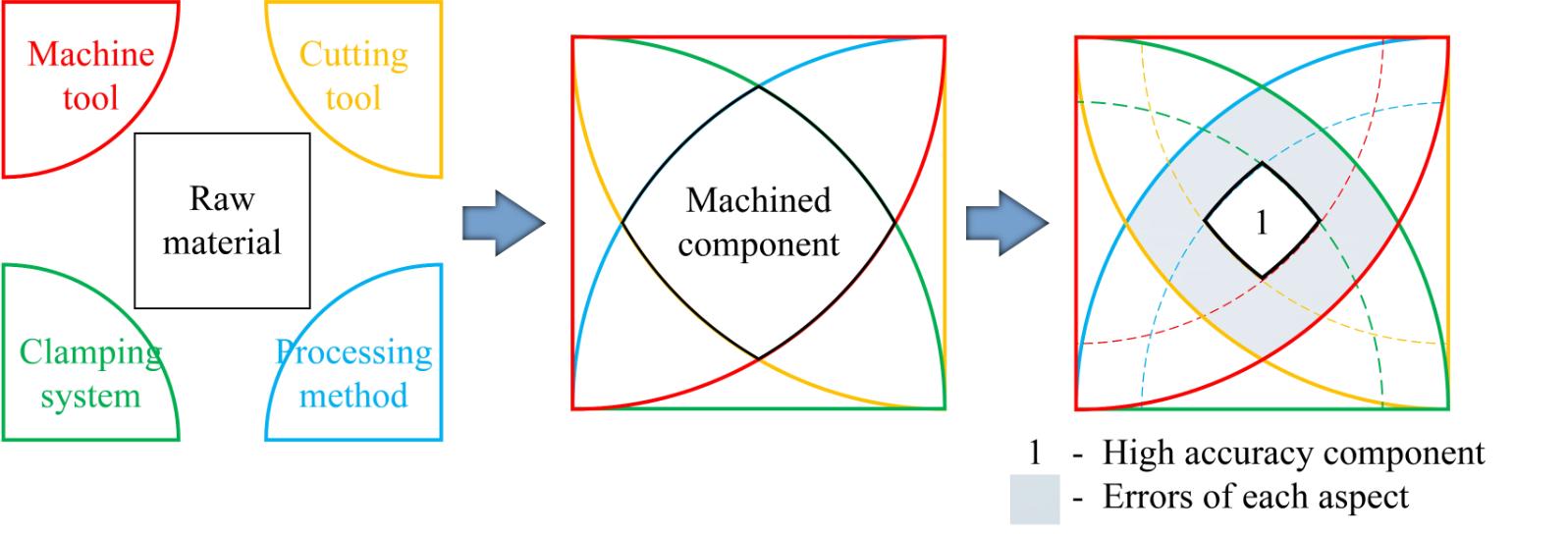
Machining technology is developed with increasing flexibility to adapt to the rapid changes of the market. Parallel kinematic machines (PKMs) have demonstrated great flexibility to suit the demands, but it is still not possible to achieve as high accuracy as the traditional NC machines (TNCMs). This paper presents a general review on the structure-based errors of PKMs in comparison with TNCMs to reveal the root causes of the errors and their relevance to the machining uncertainty. The geometric/kinematic, gravitational, and thermal aspects in both TNCMs and PKMs are identified as structure-based error sources. Errors in each aspect are comparatively analyzed, and inherent differences are found to bring new challenges to the accuracy of PKMs. Finally, perspectives in each aspect are highlighted for accuracy improvement of PKMs.
https://link.springer.com/chapter/10.1007/978-981-13-2396-6_23
Variation Sensitivity Study for an Aerospace Wing Spar Assembly
Abstract
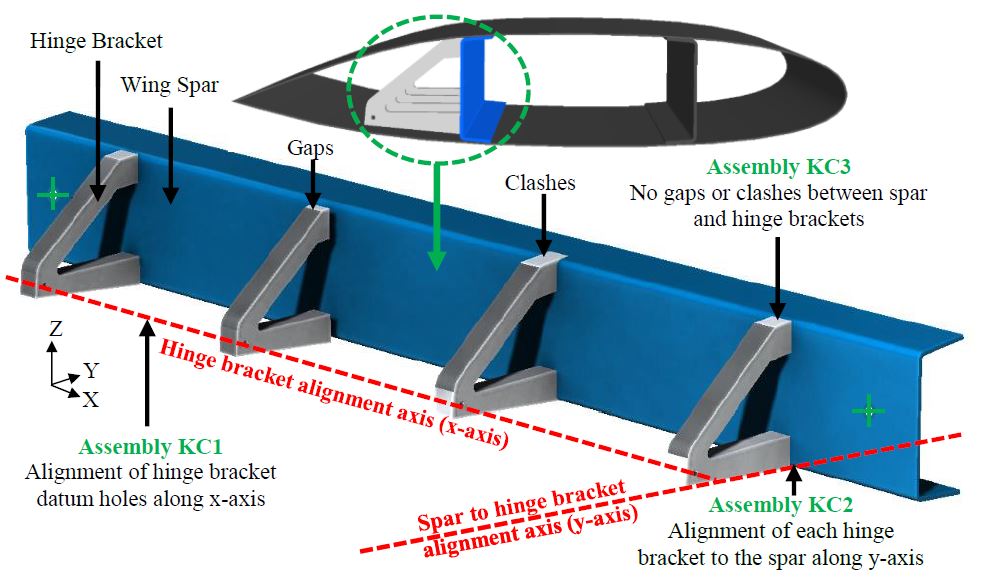
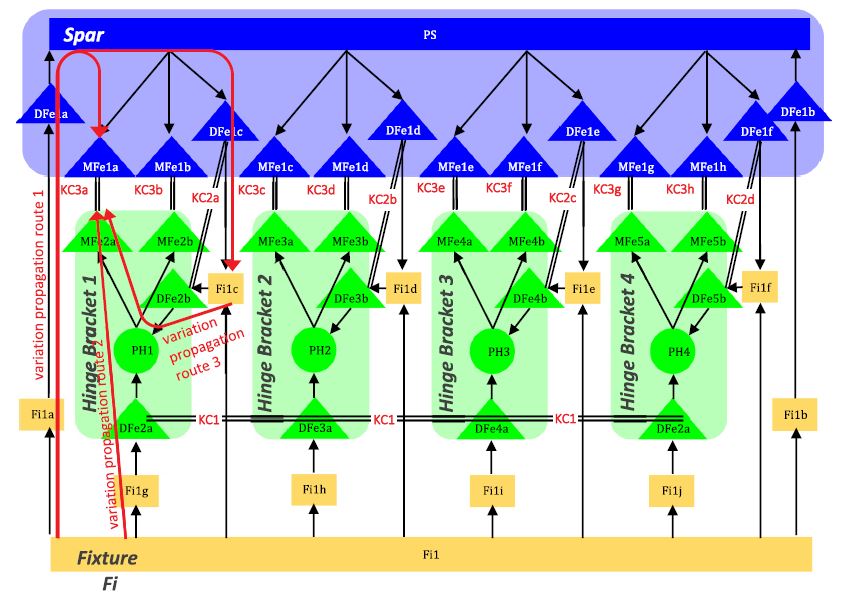
Despite manufacturing sub-components to a high precision, large overconstrained assemblies are often impossible to assemble to tolerance limits when variations are present. This necessitates expensive and time consuming variation management processes at assembly, such as shimming. Existing research has not established a methodology to model the variation propagation mechanisms that results in this assembly variation. This paper presents such a methodology, which has the ability to quantify the assembly variation of overconstrained assemblies at the planning stage, providing useful data for determining the most appropriate combination of fabrication and assembly processes to use for a given case. The methodology is validated using an aerospace wing spar assembly, and a sensitivity study completed to rank the key variation drivers in the overconstrained assembly.
Drill-exit temperature characteristics in drilling of UD and MD CFRP composites based on infrared thermography
Abstract
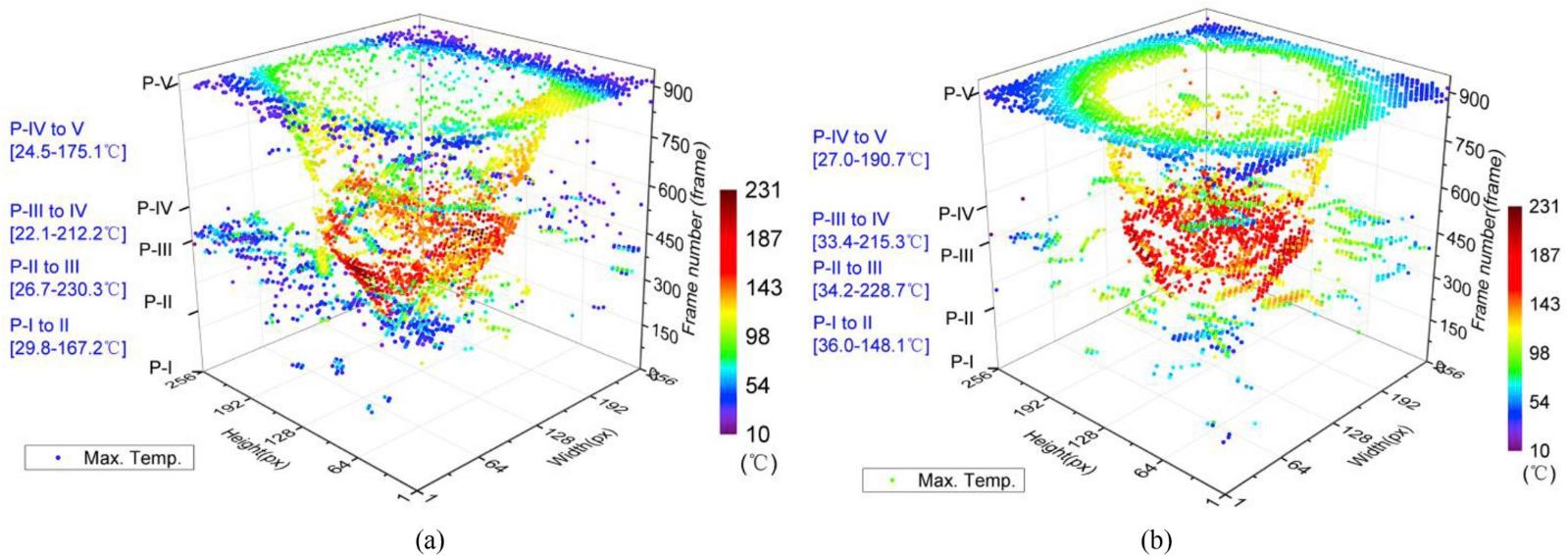
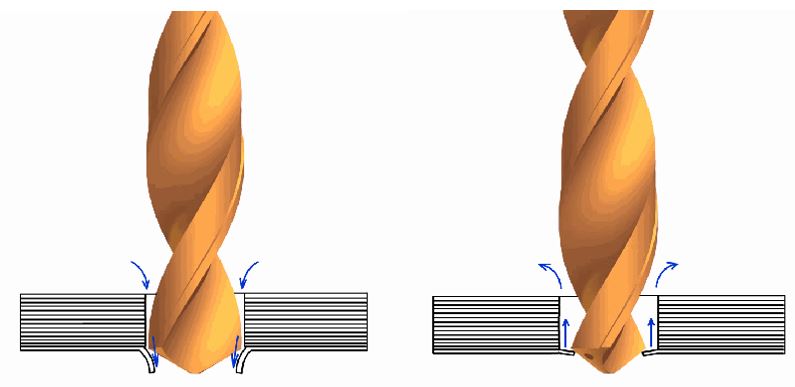
This paper presents a comprehensive study on the complex drill-exit temperature characteristics in the drilling of unidirectional (UD) and multidirectional (MD) CFRPs using a state-of-art microscopy infrared imaging system. For the first time, temperature variation and distribution at drill exit have been revealed in full detail, associated with the CFRP material properties and drilling conditions. Results suggest that the actual drill/CFRP interactions have critical but similar effects on the drill-exit temperatures for UD and MD CFRPs. Specifically, three distinct cutting regions with varying temperature characteristics are evident when the main cutting edge is acting on the drill exit material. In all cases, the temperature distribution features elliptical shape, of which the eccentricity depends on the lay-up sequence and the drilling depth. In addition, the real-time temperature profiles and 2D/3D maximum temperature distribution maps are created with high visualization. With the aid of those findings, the relationships between drilling temperature maxima, their locations and drilling depths have been discovered and temperature effects on drill-exit damages have been elucidated for the first time. MD CFRP is proven more difficult to achieve high drilling qualities at certain fiber cutting angles than UD CFRP due to the associated temperature effects. Such important knowledge enables the identification of the heat affected zones and subsequently informs strategies for reducing the negative temperature effects.
https://www.sciencedirect.com/science/article/pii/S0890695518304097
Variation Sensitivity Study for an Aerospace Wing Spar Assembly
Abstract
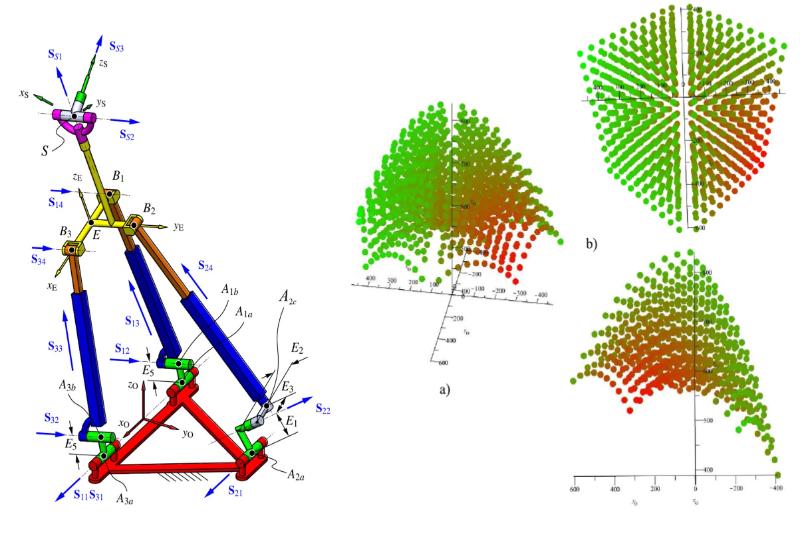
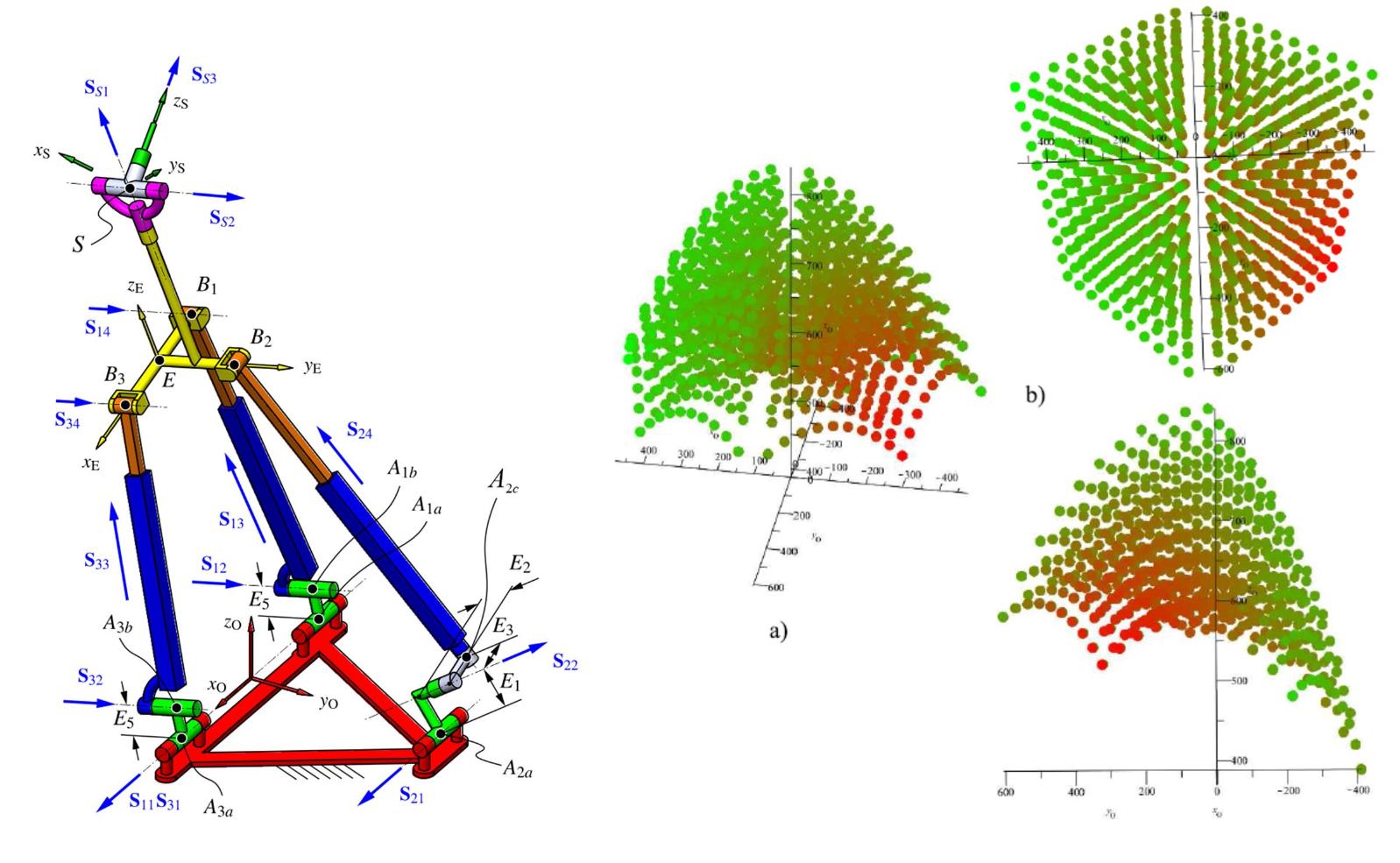
An Exechon robot with offsets between the axes of the joints that connect the legs to the fixed platform is analyzed for the first time. Ideally these axes intersect constituting two universal and one spherical joint. The insertion of imperfections in the seuniversal and spherical joints leads to more complex forward and inverse kinematics which are solved in this paper. It is proved that the equations used for the kinematics of the ideal Exechonrobot are no longer applicable when these offsets are added. The constraint system is also obtained and it is found to be different to the one of the ideal case. Finally, the combination of offsets that lead to the largest deviation in the position of the parallel platform is determined.
Cost-oriented process optimisation through variation propagation management for aircraft wing spar assembly
Abstract
Overconstrained assemblies such as aircraft sub-assemblies present a challenge to production planners, as variations in parts and processes can make it difficult to achieve all assembly Key Characteristics (KCs) simultaneously. Despite assigning tight tolerances to sub-component manufacture, part variation propagation necessitates expensive and time-consuming variation management processes such as shimming in order to ensure the final assembly is within specification. This paper presents for the first time a variation propagation model for overconstrained assemblies, and develops a novel modelling method to connect variations with production costs. This facilitates a novel process optimisation method based on variation propagation, with the ability to analyse the trade-offs between the cost and achievable variation limits of the entire manufacturing chain in order to minimise the overall manufacturing cost. An overconstrained wing spar assembly is used as a case study to validate the methodology.
https://www.sciencedirect.com/science/article/pii/S0736584518302357?via%3Dihub
Cooling Process of Reverse Air Suctioning for Damage Suppression in Drilling CFRP Composites
Abstract
Carbon fiber reinforced plastic (CFRP) composites are the first choice for high-end equipment in fields of aviation and aerospace pursuing weight reduction. However, producing high quality holes in drilling of CFRP remains a long-standing challenge mainly due to its weak interlaminate bonding and sensitivity to temperature. This article proposed a novel cooling process for drilling of CFRP, deploying reverse air suctioning, to reduce drill-exit damages. The concept of the proposed cooling process is to change the coolant flow direction, with the benefits of reducing the force of the coolant acting on the drill exit and increasing the constraint of the drill-exit material. Comparative experiments are conducted under dry and reverse air suctioning conditions. Results show that the proposed cooling process can significantly reduce the drilling temperature, below Tg. Despite the cooling process has led to increased thrust force, the drill damages have been reduced as compared with the dry drilling, and the potential damage suppression mechanisms have been discussed.
https://www.sciencedirect.com/science/article/pii/S2212827119312910?via%3Dihub
Kinematics and Constraints of the Exechon Robot Accounting Offsets Due to Errors in the Base
Abstract
An Exechon robot with offsets between the axes of the joints that connect the legs to the fixed platform is analyzed for the first time. Ideally these axes intersect constituting two universal and one spherical joints. The introduction of imperfections in these universal and spherical joints leads to more complex forward and inverse kinematics, which are solved in this paper. It is proved that the equations used for the kinematics of the ideal Exechon robot are no longer applicable when these offsets are added. The constraint system is also obtained, and it is found to be different to the one of the ideal case. Finally, the combination of offsets that lead to the largest deviation in the position of the parallel platform is determined.